水下机器人的海水液压执行机构系统
文章来源:刘希福 人气: 发表时间:2019-04-18 22:45
Ⅰ、简介
液压系统作为潜水机器人的能量系统是非常流行的。如果这个系统应用海水作为液体,那么将对潜水机器人更有益。因为这个系统也就是海水液压执行机构系统可以消除液压油的额外重量。没有笨重的液压灌,管道系统和机械运动的润滑油膛提升了潜水机器人的移动性。海水低粘度高压缩的特性为水下执行机构提供了较高的效率和良好的控制性能。另外海水十分干净和安全,因为不可能发生油污染和意外火灾。但是海水液压执行机构系统有几个问题。海水具有腐蚀性和磨损性,而且海水较低的粘度(大约是油的1/30)使组件内部巨大的泄露。
尽管有这些问题,目前一些海水液压系统已经被报道,就像[1]中提到的。但是这些系统的额定压力和效率不是很高,也就是说液压能量系统高能量密度的特点没有被最好的利用。
这篇文章介绍了一个用来解决这些问题的高压力高效率的海水液压执行机构系统已经得以实行,这个系统由一个轴向的柱塞泵、流量控制伺服阀和执行机构构成。而且还使用这些海水液压构件构建了一个带有远程压力技术的远程操作系统。
Ⅱ.海水液压执行机构系统
A. 液压泵
图1展示了海水液压泵的结构。主要的结构是参考常见的油压轴向柱塞泵。内部零件被用于其它组件最恶劣的环境中。为了避免缠绕和磨损保证较低的内部泄露,轴承和摩擦零件(活塞、阀门挡板、推力板等)由CFRP、陶瓷或者镀铬不锈钢做成。而且,海水静态压力润滑装置也用于这些零件中。使用海水润滑装置后,一切油润滑罐都不需要。
获得的输出能量的质量比是0.65kw/kg,这几乎是以前使用的油压泵的四倍。最大压力为210(300psi),额定流量是35L/min,可获得的最大效率为92%。
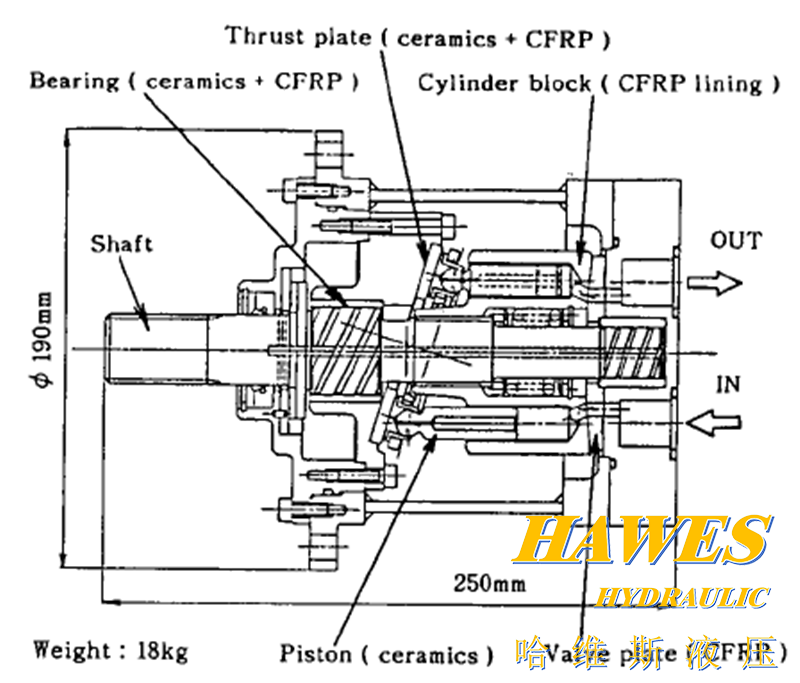
图1 海水液压泵的结构
B. 伺服阀
伺服阀的流量控制特性是决定操纵器精确平稳运动的重要因素之一。因此一个直接驱动型的芯阀被采用,这个阀是用压电陶瓷驱动器驱动的。由于这个驱动器的位移太小无法获得符合要求的流速,因此采用一个带有柔性铰链的位移放大装置。图2显示了这个海水伺服阀的轮廓。阀芯的位移通过使用张力测量仪测量回程封锁弹簧的弯曲张力测得。
额定流量为4.5L/min,额定压力为140(2000psi),内部泄露不到0.1L/min。频率响应能够达到大约200Hz(-90°)。
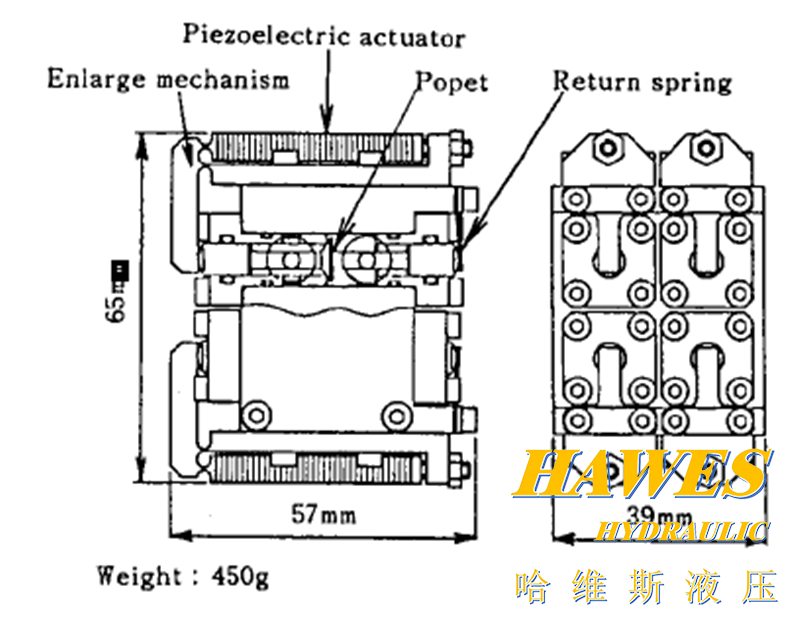
图2 海水伺服阀的结构
C. 执行机构
两种不同种类的执行机构技术已经成熟。一种是偏心叶片式马达,另一种是橡胶肌肉式执行机构。
1)用于机器人手臂的偏心叶片马达:作为机器人手臂的驱动器,良好的控制性能是依靠线性扭矩特点和较高的效率。图3为已经成熟的偏心叶片马达略图。考虑到应用海水作为液压流体,内部泄露和机械连接零件的摩擦是严重的问题。因此特别设计了叶片的密封装置用来减少内部泄露和摩擦。马达的主体部分是用较轻的钛或者铝合金做成的,并且轴承是用陶瓷制成的以减轻质量。
这个马达具有高达13kgm/kg质量比的输出转矩,并且在额定压力140(2000psi)下产生足够的输出扭矩19.2kgm,这足以直接驱动机器人的关节。扭矩的传递效率超过90%。
2)用于机器人手腕和手指的橡胶肌肉执行机构:橡胶肌肉式执行机构被称为McKiben人工肌肉,在图4[2]是这种驱动器的略图。人工肌肉式由薄橡胶管制成,橡胶管由合成光纤做的十字绳索缠绕。受压液体被压人管中,在十字绳索的作用下管由膨胀变为收缩。
人工肌肉质量很轻,大约为5g。在额定压力20(286psi)下,收缩压力为50kg。
这个驱动器用于机器人的手腕和手的机械装置,以用一个回程弹簧互拉的原理工作。
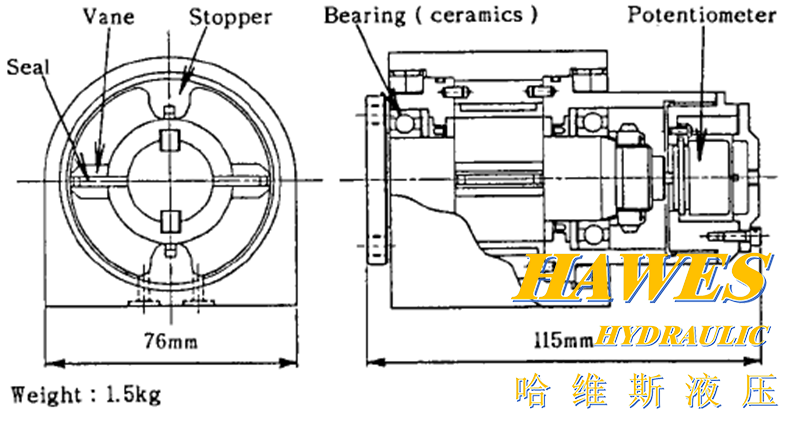
图3 偏心叶片马达的结构
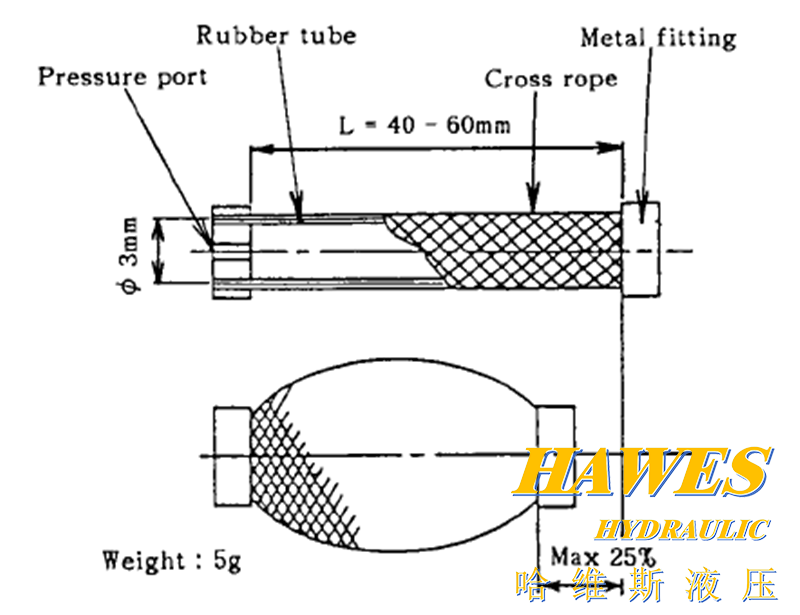
图4 橡胶肌肉驱动器的结构
D. 海水液压系统的伺服特性
为了了解这些构件的基本特点,建立了图5所示的位置反馈伺服系统,并且做了实验。图6显示了静态和动态特点:
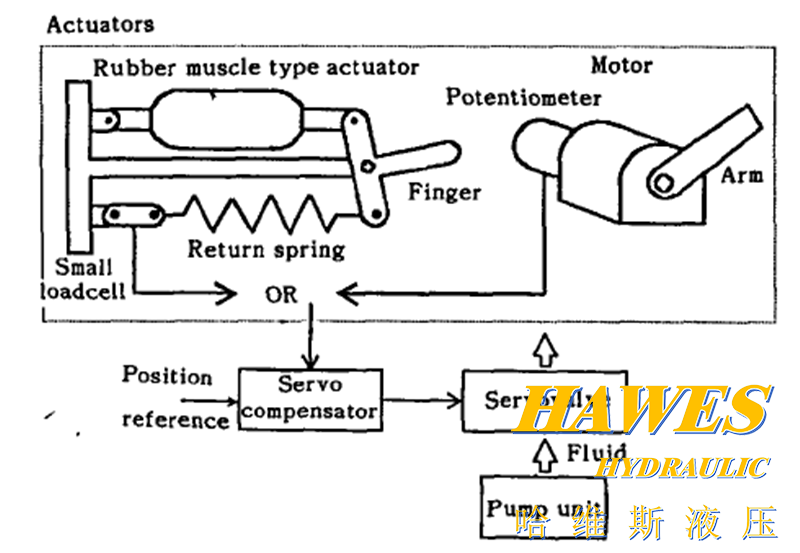
图5 海水液压伺服系统
1) 偏心叶片驱动器:定位精确度和响应速度与油压系统的相同。
2) 橡胶肌肉驱动器:位移信号上小的震动是由于一个小负载单元上的噪声。对阶梯响应来说,拉伸的静态决定时间比弯曲的长很多,因为橡胶肌肉内的压力由于管阻变小的不快。
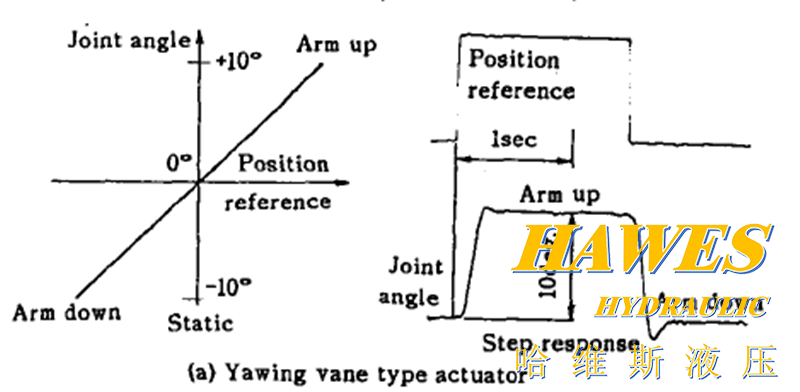
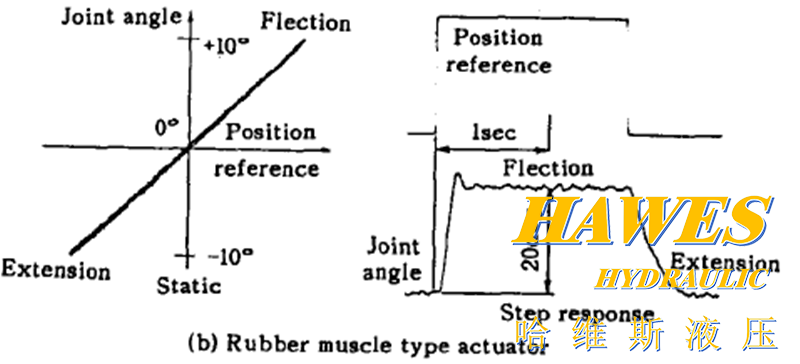
图6 基本特征
Ⅲ.远程操作系统
图7是这个系统的简要原理图。在较远的位置,在盛满人造海水或者生水的水罐里放着一个由胳膊和手组成的机器人。海水伺服阀和驱动器安装在手臂上。一个泵装置(泵本身和电子马达)在灌中吸水并给水加压。高压流体被注入机器人中。
机器人控制器在操纵者一边。人类操纵员通过精确的仪器控制机器人,这个仪器通过视力照相机从水下获得视觉的信息和通过机器手获得的触觉信息。下面是水下远程操控系统个部件的详细信息。
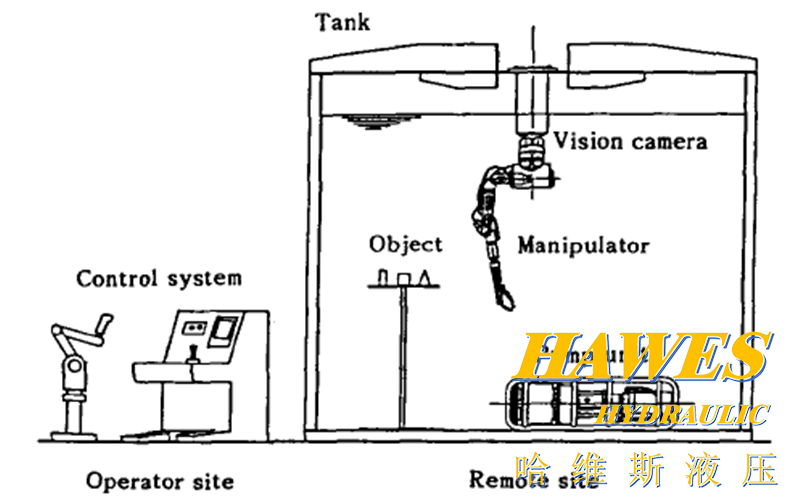
图7 远程操控系统的实验结构
A.机器人的硬件
图8显示机器人的外形和关节的结构。
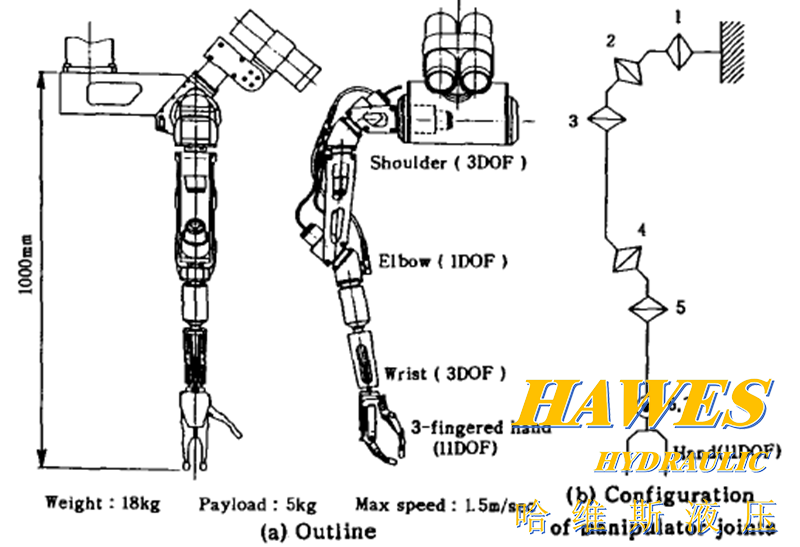
图8 机器人模型
1)手臂: 这个手臂有七个类人类的自由度。其中四个用来定位,其他用来定向。对于定位来说四个自由度是多余的,因此机器人可以用适当的姿势在宽阔的工作空间接近物体。因为没有直角关节(第二和第四关节),所以手臂的外形比较苗条,从而减小液体阻力。
手臂结构为骨骼型可以减轻重量,并且维修方便。马达主体部分和阀块被设计成构成骨架的一部分。构成材料全为铝合金,且其表面覆盖氧化物和聚四氟乙烯防止海水腐蚀而起到保护作用。
像位移传感器或者伺服阀这样的电子部件放在防水的容器中,电线通过气动连接器放在气动导管中。
2)机器手:机器手是机器人的重要装置,可以在水下接触,抓,操控物体。因此为了代替潜水员的手来实现高水平的任务,就要求多功能性和灵敏性。从直接远程操作控制,也需要人类操作员来掌握机器手和目标之间的相对位置。
考虑到这些问题,一个模拟人手形状和功能的有指机械手就被采用了。但是从手的原理和控制的复杂程度模拟手指和关节的数量是非常难的也是不现实的。因此手指的数量定位三个(拇指、食指和中指),因为这是实现操控和稳定抓住不同形状目标的最小数量。
图9是成熟的三指机械手的一个关节结构。其中的七个关节是由操作员灵活控制的,七个是拇指的三个关节和另外两个手指的中间和下面关节。剩余的关节为适应目标而弯曲。
执行结构也就是橡胶肌肉驱动器安装在手掌,并且每个关节都由连接链驱动。这些关节的收缩由人工肌肉完成,伸展由回程弹簧完成。每个关节的收缩角度通过用一个小的负载单位测量回程弹簧的收缩压力来测得。一个关节的收缩转矩最大为0.3kgm,足够用于实际应用。
每个手指尖都是应用帕斯卡原理的触觉传感器。指尖主要部分安装一个小型的压力传感器,传感器被包裹在由橡胶管做成的空腔内。这个腔内装满水。当手指尖接触物体,水的压力随着接触压力按比例增长。
图示是这个成熟的三指手的外形图。这个手在形状和重量上和一个成年男性的手相似。长度(从指尖到掌跟)为200mm,质量为600g。
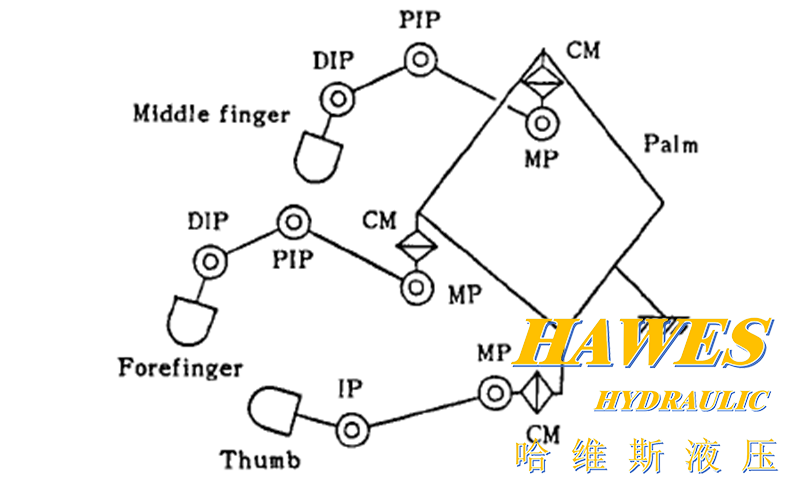
图9 机器手关节的结构
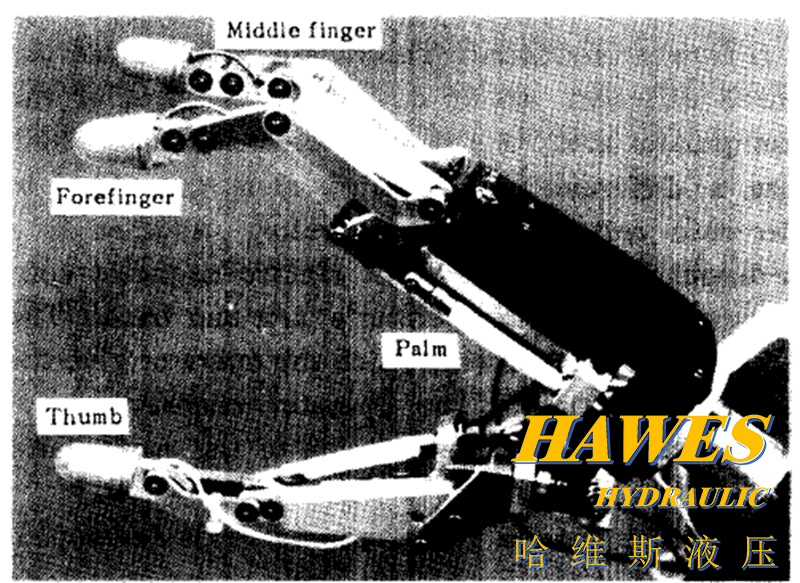
图10 三指机器手
B. 控制系统
图11是远程机器人的控制系统的功能模块图。图12为操作员的工作间。
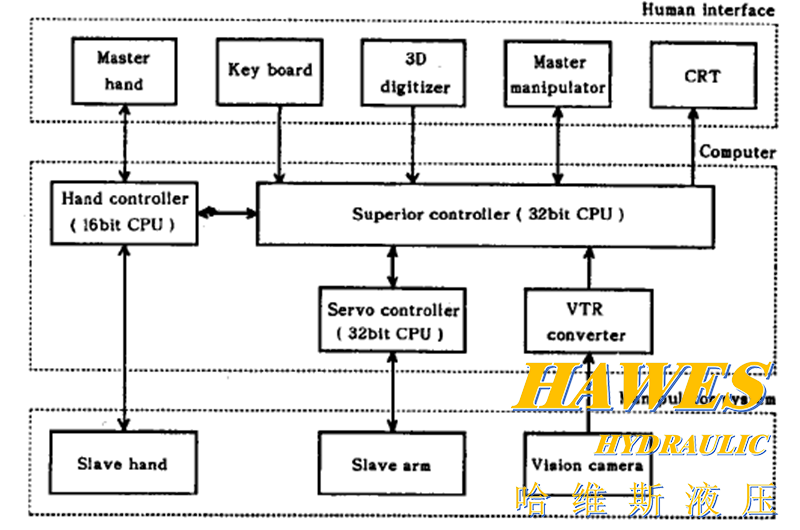
图11 控制系统结构
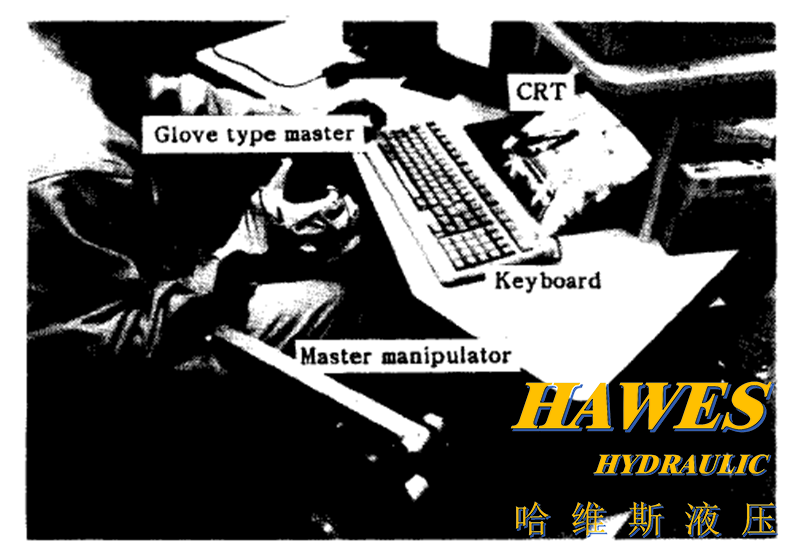
图12 操作员工作间略图
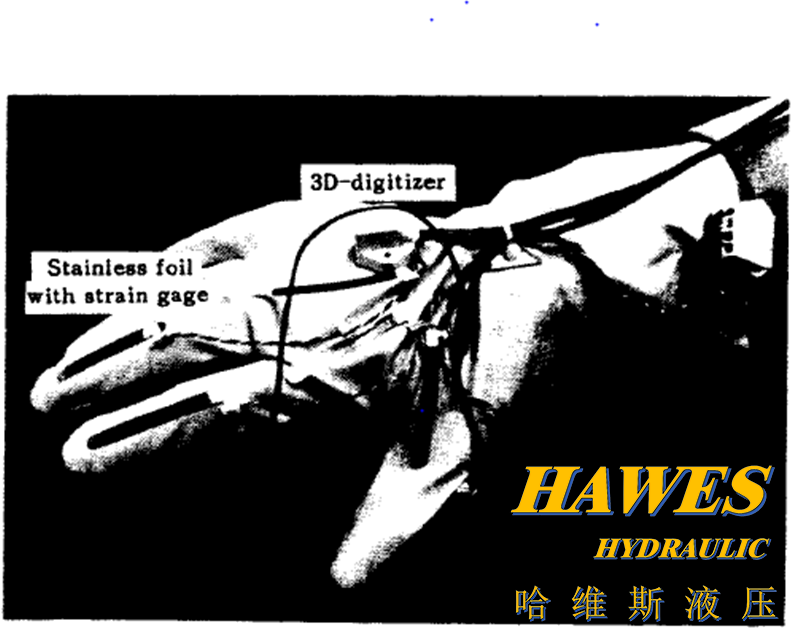
图13 手套型控制器
1)人机接口:操作员可以使用三个不同的主要设备来控制机器人手臂。其中主要的操作设备的结构与从动装置的不同,用来减少操作者的约束。第二个是应用电磁结合的三维数字控制设备,用来放松操作者的胳膊和手。另一个是操作者用来给从动装置发出指令的键盘。操作者根据机器人的工作情况从中选择合适的控制装置。
为机器手设计了如图13所示的手套式控制器。操作者每个关节的角度都将被测得,这是通过测量贴在手套合适关节位置上不锈金属薄片的弯曲压力而获得的。人类操作员以200Hz震动的形式从机器人手感觉触觉信息。这个是通过贴在手套每个手指上的活动的线圈型小型螺线管实现的。振动的振幅与接触机器手产生的压力成比例。此外上文提到的三维数字控制器安装在主要手套的背面。这个主控制器为三个从动手指的合作提供了简单的操作,因为机器手和操作员的手的每个动作都直接联系在一起,操作员的手几乎没有约束。
视觉信息由安装在机器人头上的水下视觉照相机传送。通过视觉信息,操作员能够迅速识别和判断机器手和目标之间的关系。
2)控制器:控制器主要由三个计算机组成:其中一个32位计算机被用于上级控制器。这个计算机控制主人设备和处理命令数据。这些数据坐标位移的计算也是由这个计算机负责。此外,作为一个人机接口,机器人为操作者提供水下机器人的状态信息。另一个32位单元作为机器人手臂的伺服控制器。最后一个16位计算机用来控制手套控制器和三个手指的手。这三个电脑被连在相同的界面。
位置反馈被主要的应用,操作者可以根据工作环境改变手臂的服从。
所有的程序都被写成C语言。机器人手臂的抽样周期大约为3毫秒机器手的大约为7毫秒。
C.运行测试结果
为了测试机器人手臂和手的可控制性,巨大的阀门把手被握住(图14)。手臂和手的结合运动运行正常。尽管机器手臂没有力和扭矩的传感器,软化的手臂服从提供了一个简单的操作。
三手指手的灵巧程度和手套型操控器的效果在图15中显示,小阀门把手操作。三个手指的组合运动工作的非常顺利。
这些操作很容易实现由于某些远程控制设备,像人体结构手原理或者带有触觉传感和水下视觉照相机的手套控制器。尤其是在某些物体堵塞了水下视觉以至机器人不能直接观察到手指和目标的关系时,触觉信息增强了操作功能。
当然这些成功的测试显示了海水液压机器人系统的良好性能。

图14巨大阀把手操作
图15 小阀把手操作
Ⅳ. 总结
这篇文章报告的技术覆盖许多领域,总结如下:(1)新的驱动器系统已经发展起来,也就是由泵、伺服阀和驱动器组成的海水液压驱动器系统。这个能量系统的所有特性已经确认完全满足实际应用。(2)远程操作系统(上文这样提到了)也建立了。通过连续测试,这个系统令人满意的表现也得到确认。
参考文献
[1]R. C. Horn, "Seawater Hydraulic Manipulator Boom for RUM 111", ROV 83 conference Proceedings, 1983,
pp. 60-65.
[2]H. F. Schulte Jr. "The characteristics of the McKiben Artificial Muscle", The application of External Power in Prosthetics and Orthotics,
1960, pp.94-115.
[3]T. Naruse, "Seawater Hydraulic Actuator System for Subsea Manipulator", The 1st rorkshop on Mobile Robots for Subsea Environments, 1990 chapter 3.
[4]H. Yoshinada, "Seawater Hydraulic Actuator System for Subsea Manipulator", '91 International Symposium on Advanced Robot Technology, 1991, pp. 559-566.


 在线定制专属液压系统
在线定制专属液压系统 扫一扫添加微信
扫一扫添加微信
